PhysObj:LocalToWorldVector
Description
Rotationally transforms a vector in the physics object's local space by the PhysObj:GetPositionMatrix.
In contrast to PhysObj:LocalToWorld, this function doesn't translate the vector.
Arguments
Returns
Example
Displays the forward, right, and up directions of the physics object the player's looking at, using debugoverlay.
Output: 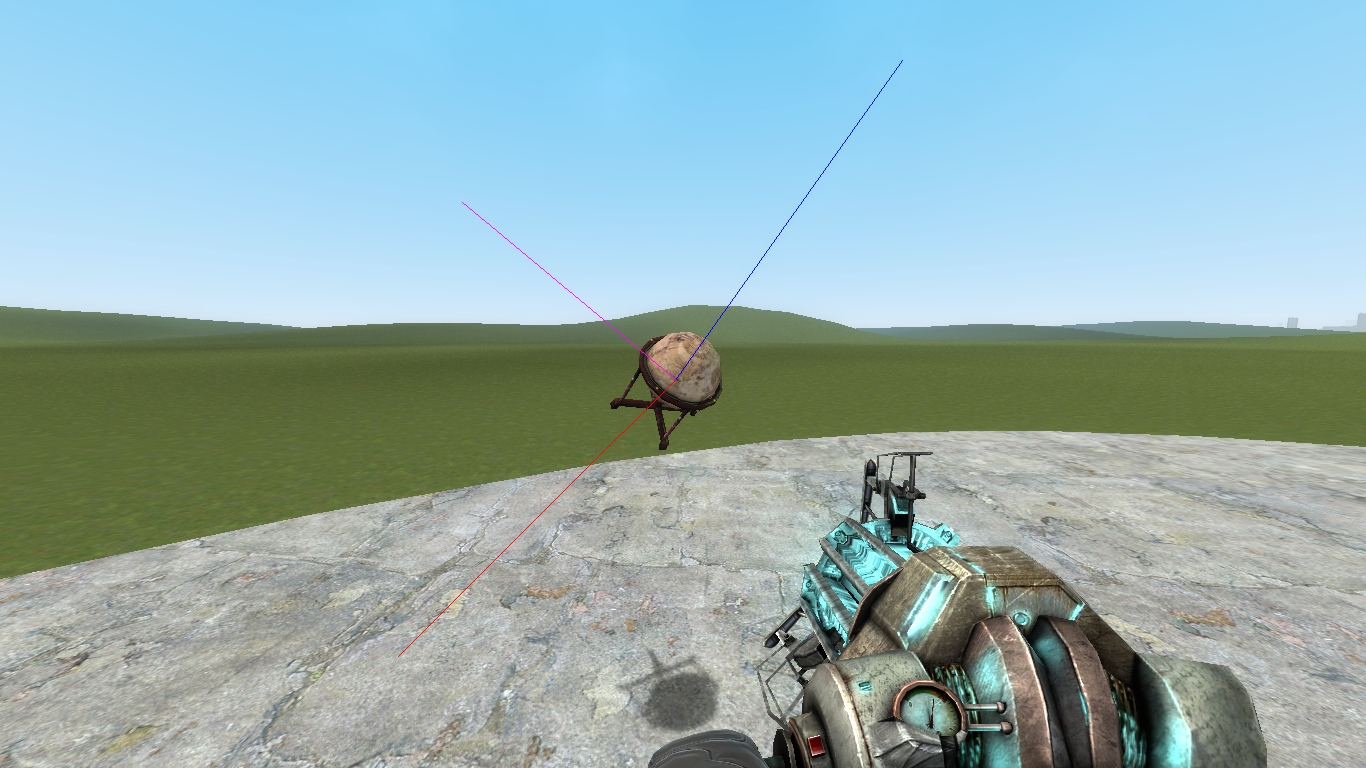
 Garry's Mod
Garry's Mod
 Rust
Rust
 Steamworks
Steamworks
 Wiki Help
Wiki Help